Detailed Description
This class implements a generic Newton-Raphson solver for SOFA.
Let  be a non-linear function. This component will try to solve
be a non-linear function. This component will try to solve
using the following iterative method:
![\begin{align*} \mat{J} \left [ \Delta \vect{x}_{n+1}^{i+1} \right ] &= - \vect{F}(\vect{x}_{n+1}^i) \\ \vect{x}_{n+1}^{i+1} &= \vect{x}_{n+1}^{i} + \Delta \vect{x}_{n+1}^{i+1} \end{align*}](form_41.png)
where  is the vector
is the vector  evaluated at the time step
evaluated at the time step  and Newton iteration
and Newton iteration  .
.  is the jacobian of
is the jacobian of  , and is defined as
, and is defined as
#include <NewtonRaphsonSolver.h>
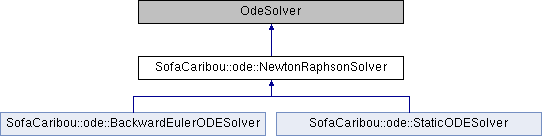
Inheritance diagram for SofaCaribou::ode::NewtonRaphsonSolver:
Public Types | |
| template<typename T > | |
| using | Data = sofa::core::objectmodel::Data< T > |
| template<typename T > | |
| using | Link = sofa::core::objectmodel::SingleLink< NewtonRaphsonSolver, T, sofa::core::objectmodel::BaseLink::FLAG_STRONGLINK > |
Public Member Functions | |
| SOFA_CLASS (NewtonRaphsonSolver, sofa::core::behavior::OdeSolver) | |
| void | init () override |
| void | solve (const sofa::core::ExecParams *params, SReal dt, sofa::core::MultiVecCoordId x_id, sofa::core::MultiVecDerivId v_id) override |
| auto | iteration_times () const -> const std::vector< UNSIGNED_INTEGER_TYPE > & |
| List of times (in nanoseconds) that each Newton-Raphson iteration took to compute in the last call to Solve(). | |
| auto | squared_residuals () const -> const std::vector< FLOATING_POINT_TYPE > & |
| The list of squared residual norms (||r||^2) of every newton iterations of the last solve call. | |
| auto | squared_initial_residual () const -> const FLOATING_POINT_TYPE & |
| The initial squared residual (||r0||^2) of the last solve call. | |
The documentation for this class was generated from the following files:
- /home/jnbrunet/sources/caribou/src/Plugin/Ode/NewtonRaphsonSolver.h
- /home/jnbrunet/sources/caribou/src/Plugin/Ode/NewtonRaphsonSolver.cpp