|
|
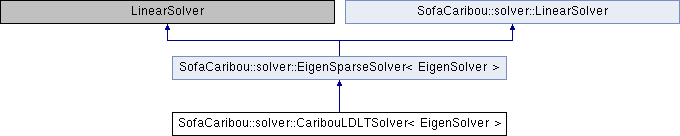
| SOFA_CLASS (SOFA_TEMPLATE(CaribouLDLTSolver, EigenSolver), SOFA_TEMPLATE(EigenSparseSolver, EigenSolver)) |
| |
|
| SOFA_CLASS (SOFA_TEMPLATE(EigenSparseSolver, EigenSolver), sofa::core::behavior::LinearSolver) |
| |
| virtual void | assemble (const sofa::core::MechanicalParams *mparams) |
| | Assemble the system matrix A = (mM + bB + kK) inside the SparseMatrix p_A. More...
|
| |
| void | resetSystem () final |
| | Reset the complete system (A, x and b are cleared). More...
|
| |
| void | setSystemMBKMatrix (const sofa::core::MechanicalParams *mparams) final |
| | Set the linear system matrix A = (mM + bB + kK), storing the coefficients m, b and k of the mechanical M,B,K matrices. More...
|
| |
| void | setSystemRHVector (sofa::core::MultiVecDerivId b_id) final |
| | Gives the identifier of the right-hand side vector b. More...
|
| |
| void | setSystemLHVector (sofa::core::MultiVecDerivId x_id) final |
| | Gives the identifier of the left-hand side vector x. More...
|
| |
|
void | solveSystem () override |
| | Solves the system using the Eigen solver.
|
| |
| virtual auto | symmetric () const -> bool |
| | States if the system matrix is symmetric. More...
|
| |
|
virtual void | set_symmetric (bool is_symmetric) |
| | Explicitly states if this matrix is symmetric.
|
| |
|
auto | solver () const -> const EigenSolver & |
| | Get a readonly reference to the backend solver.
|
| |
|
auto | solver () -> EigenSolver & |
| | Get a reference to the backend solver.
|
| |
|
auto | mechanical_params () const -> const sofa::core::MechanicalParams & |
| | Get a readonly reference to the mechanical parameters.
|
| |
| auto | matrix_accessor () const -> const sofa::component::linearsolver::DefaultMultiMatrixAccessor & |
| | Get a readonly reference to the multi-matrix accessor. More...
|
| |
|
auto | A () const -> const SparseMatrix & |
| | Get a readonly reference to the global assembled system matrix.
|
| |
|
auto | b_id () const -> const sofa::core::MultiVecDerivId & |
| | Get a readonly reference to the right-hand side vector identifier.
|
| |
|
auto | x_id () const -> const sofa::core::MultiVecDerivId & |
| | Get a readonly reference to the left-hand side unknown vector identifier.
|
| |
|
auto | A_is_factorized () const -> bool |
| | True if the solver has successfully factorize the system matrix.
|
| |
| virtual sofa::defaulttype::BaseMatrix * | create_new_matrix (unsigned int rows, unsigned int cols) const =0 |
| | Creates a new BaseMatrix of size rows x cols. More...
|
| |
| virtual sofa::defaulttype::BaseVector * | create_new_vector (unsigned int n) const =0 |
| | Creates a new BaseVector of size n. More...
|
| |
 Public Types inherited from SofaCaribou::solver::EigenSparseSolver< EigenSolver >
Public Types inherited from SofaCaribou::solver::EigenSparseSolver< EigenSolver >