Detailed Description
Implementation of a static ODE solver compatible with non-linear materials.
We are trying to solve to following

Where  is the (possibly non-linear) internal elastic force residual and
is the (possibly non-linear) internal elastic force residual and  is the external force vector (for example, gravitation force or surface traction).
is the external force vector (for example, gravitation force or surface traction).
Following the Newton-Raphson method, we pose
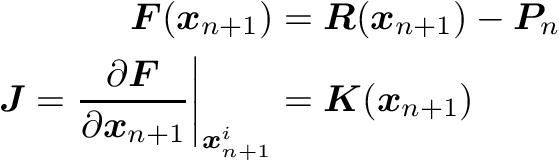
where  is the unknown position vector at the
is the unknown position vector at the  th time step. We then iteratively solve
th time step. We then iteratively solve
![\begin{align*} \mat{K}(\vect{x}_{n+1}^i) \left [ \Delta \vect{x}_{n+1}^{i+1} \right ] &= - \vect{F}(\vect{x}_{n+1}^i) \\ \vect{x}_{n+1}^{i+1} &= \vect{x}_{n+1}^{i} + \Delta \vect{x}_{n+1}^{i+1} \end{align*}](form_49.png)
#include <StaticODESolver.h>
Inheritance diagram for SofaCaribou::ode::StaticODESolver:
Public Types | |
| template<typename T > | |
| using | Data = sofa::core::objectmodel::Data< T > |
 Public Types inherited from SofaCaribou::ode::NewtonRaphsonSolver Public Types inherited from SofaCaribou::ode::NewtonRaphsonSolver | |
| template<typename T > | |
| using | Data = sofa::core::objectmodel::Data< T > |
| template<typename T > | |
| using | Link = sofa::core::objectmodel::SingleLink< NewtonRaphsonSolver, T, sofa::core::objectmodel::BaseLink::FLAG_STRONGLINK > |
Public Member Functions | |
| SOFA_CLASS (StaticODESolver, NewtonRaphsonSolver) | |
| Public Member Functions inherited from SofaCaribou::ode::NewtonRaphsonSolver | |
| SOFA_CLASS (NewtonRaphsonSolver, sofa::core::behavior::OdeSolver) | |
| void | init () override |
| void | solve (const sofa::core::ExecParams *params, SReal dt, sofa::core::MultiVecCoordId x_id, sofa::core::MultiVecDerivId v_id) override |
| auto | iteration_times () const -> const std::vector< UNSIGNED_INTEGER_TYPE > & |
| List of times (in nanoseconds) that each Newton-Raphson iteration took to compute in the last call to Solve(). | |
| auto | squared_residuals () const -> const std::vector< FLOATING_POINT_TYPE > & |
| The list of squared residual norms (||r||^2) of every newton iterations of the last solve call. | |
| auto | squared_initial_residual () const -> const FLOATING_POINT_TYPE & |
| The initial squared residual (||r0||^2) of the last solve call. | |
The documentation for this class was generated from the following files:
- /home/jnbrunet/sources/caribou/src/Plugin/Ode/StaticODESolver.h
- /home/jnbrunet/sources/caribou/src/Plugin/Ode/StaticODESolver.cpp